Los motores asíncronos o de inducción son un tipo de motores eléctricos de corriente alterna. El primer prototipo de motor eléctrico capaz de funcionar con corriente alterna fue desarrollado y construido por el ingeniero Nikola Tesla y presentado en el American Institute of Electrical Engineers (en español, Instituto Americano de Ingenieros Eléctricos, actualmente IEEE) en 1888.
El motor asíncrono trifásico está formado por un rotor, que puede ser de dos tipos: a) de jaula de ardilla; b) bobinado, y un estátor, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y están desfasadas entre sí 120º. Según el Teorema de Ferraris, cuando por estas bobinas circula un sistema de corrientes trifásicas, se induce un campo magnético giratorio que envuelve al rotor. Este campo magnético variable va a inducir una tensión en el rotor según la Ley de inducción de Faraday.
Entonces se da el efecto Laplace (ó efecto motor): todo conductor por el que circula una corriente eléctrica, inmerso en un campo magnético experimenta una fuerza que lo tiende a poner en movimiento. Simultáneamente se da el efecto Faraday (ó efecto generador): en todo conductor que se mueva en el seno de un campo magnético se induce una tensión.
El campo magnético giratoria, a velocidad de sincronismo, creado por el bobinado del estator, corta los conductores del rotor, por lo que se genera una fuerza electromotriz de inducción.
La acción mutua del campo giratorio y las corrientes existentes en los conductores del rotor, originan una fuerza electrodinámica sobre dichos conductores del rotor, las cuales hacen girar el rotor del motor.
La diferencia entre las velocidades del rotor y el campo magnetico se denomina deslizamiento.
Constitución del motor asíncrono
Circuito magnetico
La parte fija del circuito magnetico (estator) es un anillo cilindrico de chapa magnetica ajustado a la carcasa que lo envuelve. La carcasa tiene una funcion puramente protectora. En la parte interior del estator van dispuestos unas ranuras donde se coloca el bobinado correspondiente.
En el interior del estator va colocado el rotor, que es un cilindro de chapa magnetica fijado al eje. En su periferia van dispuestas unas ranuras en las que se coloca el bobinado correspondiente.
El entrehierro de estos motores es constante en toda su circunferencia y su valor debe ser el minimo posible
Circuitos electricos
Los dos circuitos eléctricos van situados uno en las ranuras del estator (primario) y otro en las del rotor (secundario), que esta cortocircuitado.
El rotor en cortocircuito puede estar formado por bobinas que se cortocircuitan en el exterior de la maquina directamente o mediante reostatos; o bien, puede estar formado por barras de cobre colocadas en las ranuras, que han de ser cuidadosamente soldadas a dos anillos del mismo material, llamados anillos de cortocircuito. Este conjunto de barras y anillos forma el motor jaula de ardilla
También existen motores asíncronos monofásicos, en los cuales el estator tiene un devanado monofásico y el rotor es de jaula de ardilla. Son motores de pequeña potencia y en ellos, en virtud del Teorema de Leblanc, el campo magnético es igual a la suma de dos campos giratorios iguales que rotan en sentidos opuestos.
Tipos Constructivos
El motor de jaula de ardilla consta de un rotor constituido por una serie de conductores metálicos (normalmente de aluminio) dispuestos paralelamente unos a otros, y cortocircuitados en sus extremos por unos anillos metálicos, esto es lo que forma la llamada jaula de ardilla por su similitud gráfica con una jaula de ardilla. Esta 'jaula' se rellena de material, normalmente chapa apilada. De esta manera, se consigue un sistema n-fásico de conductores (siendo n el número de conductores) situado en el interior del campo magnético giratorio creado por el estator, con lo cual se tiene un sistema físico muy eficaz, simple, y muy robusto (básicamente, no requiere mantenimiento).
El motor de rotor bobinado tiene un rotor constituido, en vez de por una jaula, por una serie de conductores bobinados sobre él en una serie de ranuras situadas sobre su superficie. De esta forma se tiene un bobinado en el interior del campo magnético del estátor, del mismo número de polos (ha de ser construido con mucho cuidado), y en movimiento. Este rotor es mucho más complicado de fabricar y mantener que el de jaula de ardilla, pero permite el acceso al mismo desde el exterior a través de unos anillos que son los que cortocircuitan los bobinados. Esto tiene ventajas, como la posibilidad de utilizar un reostato de arranque que permite modificar la velocidad y el par de arranque, así como el reducir la corriente de arranque.
En cualquiera de los dos casos, el campo magnético giratorio producido por las bobinas inductoras del estator genera unas corrientes inducidas en el rotor, que son las que producen el movimiento.
Fuente: Wikipedia,
ver enlace
http://es.wikipedia.org/wiki/Motor_as%C3%ADncrono


Motor de inducción tipo jaula de ardilla

Partes de un motor trifásico de torod bobinado
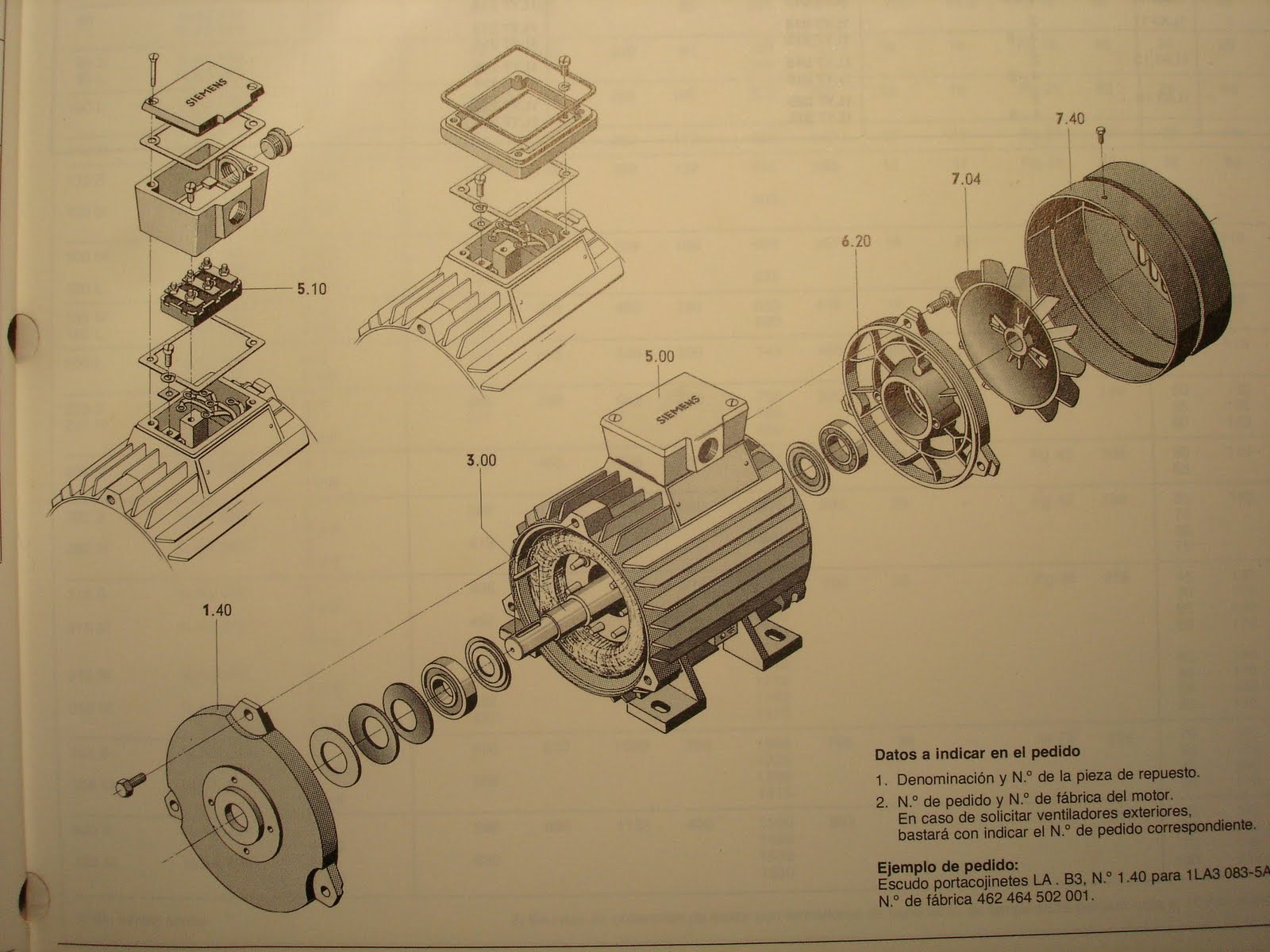
Partes de un motor jaula de ardilla

Lista de partes de un motor trifásico jaula de ardilla

Placa de datos de un motor trifásico de 5 HP

Montaje de bomba de agua con motor trifásico de 5 HP, 480 voltios

datos de motor de una bomba sumergible de 25 HP, 480 V

Principio de funcionamiento del motor jaula de ardilla

Tipos de rotores en motores de inducción

Conexión de devanados

Cambio de rotación (inversión de giro)
Para realizar el cambio de giro hay que intercambiar dos fases cualquiera.

















